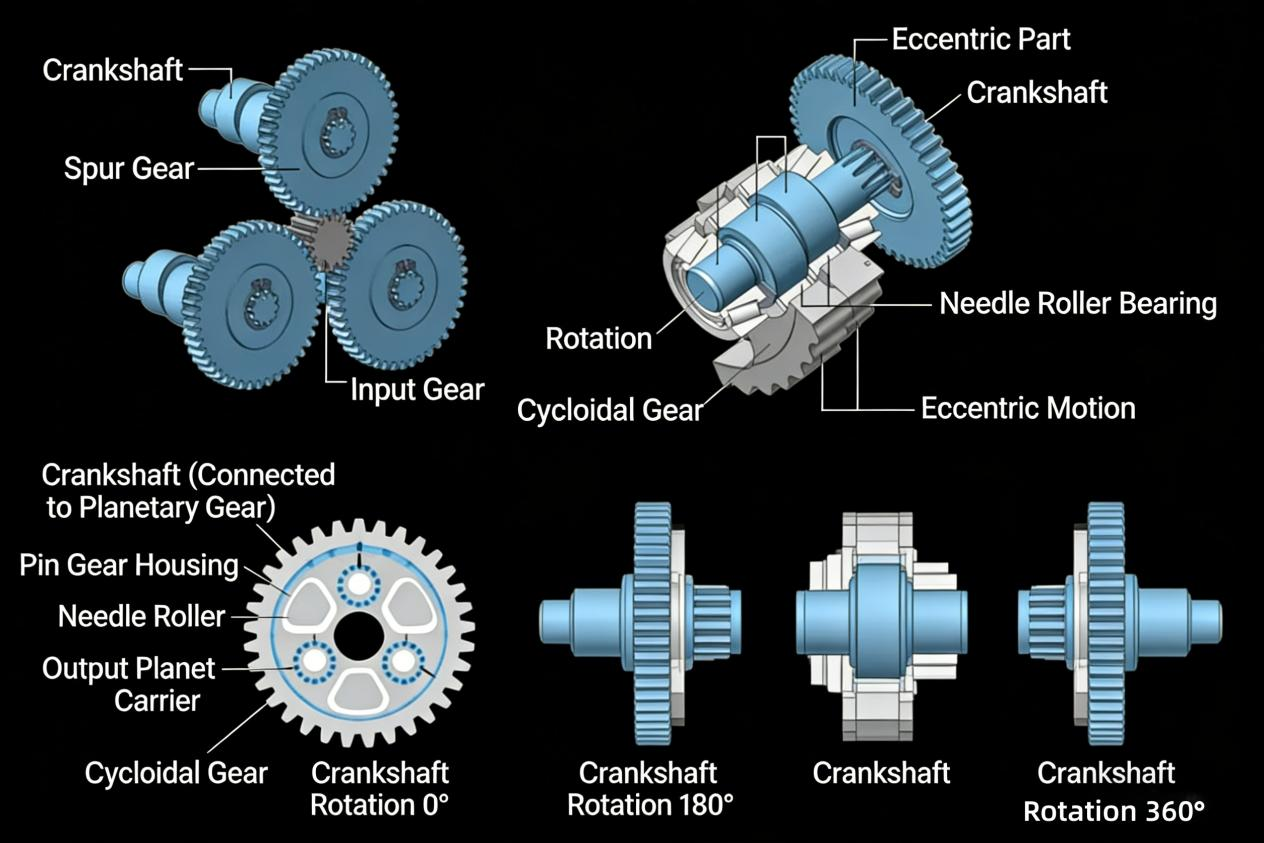
1. Redüktörün Çalışma Prensibi ve Temel Sınıflandırması Mekanik iletim sistemlerinde, redüktör, güç kaynağı ve aktüatörü birbirine bağlayan kritik bir ara cihaz olarak işlev görür. Temel mekanizması, mekanik iletim yoluyla dişli küçültme ve tork yükseltmeyi içerir. Özellikle, redüktör, giriş milinin (daha az dişli) çıkış milinin daha büyük dişlisiyle kenetlendiği bir dişli sistemi kullanır; bu da ana tahrik motorunun yüksek hızlı dönme kuvvetini etkili bir şekilde yavaşlatırken çıkış torkunu artırır. Sonuç olarak, redüktörler düşük hızlı, yüksek torklu iletim ekipmanlarında yaygın olarak kullanılır ve robotik performansı etkileyen önemli bir faktör olarak kabul edilir. Redüktörler, endüstriler genelinde değişen güç iletim ihtiyaçlarını karşılamak için çeşitli tip ve modellerde gelir. Birden fazla şekilde sınıflandırılabilirler. Kontrol hassasiyetine bağlı olarak, redüktörler genel amaçlı redüktörler ve hassas redüktörler olarak kategorize edilir. Genel amaçlı redüktörler daha düşük kontrol hassasiyeti sunar, ancak genel makinelerde temel güç iletimi için yeterlidir. Hassas redüktörler ise yüksek doğruluk, uzun hizmet ömrü, minimum boşluk ve üstün güvenilirlik özellikleriyle endüstriyel robotik, işbirlikçi robotik, endüstriyel otomasyon ve diğer gelişmiş üretim alanlarındaki yüksek hassasiyetli kontrol uygulamaları için idealdir. Başlıca RV redüktörleri ve harmonik redüktörler olmak üzere hassas redüktörler, robotik gibi üst düzey ekipman üretiminde temel bileşenlerdir ve bir endüstriyel robotun toplam maliyetinin yaklaşık 'ini oluşturur. Bu redüktörler, endüstriyel robotlar, işbirlikçi robotlar ve endüstriyel otomasyon dahil olmak üzere yüksek hassasiyetli kontrol uygulamalarında yaygın olarak kullanılır ve bu uygulamalarda yüksek teknik engellerle karşılaşırlar. Özellikle, harmonik redüktörler hafif, düşük yük uygulamaları için tasarlanırken, RV redüktörler yüksek tork ve rijitlik gerektiren orta ila yüksek yük senaryoları için optimize edilmiştir. İkincisi daha gelişmiş teknoloji gerektirir, üretim ve montajda daha büyük zorluklar sunar ve yerli üretim oranı daha düşüktür. Şu anda Japonya'nın Nabtesco şirketi bu küresel pazarda lider konumunu korumaktadır. İletim prensipleri ve yapısal tasarımlarındaki farklı teknik özellikleri nedeniyle, bu iki sistem, çeşitli senaryolara ve son kullanım sektörlerine hizmet ederek, alt ürün ve uygulama alanlarında tamamlayıcı avantajlar sergilemektedir. Endüstriyel robotikte somut bir karşılaştırma şu şekildedir: Proje RV yavaşlatıcı harmonik redüktör İletim prensibi ve yavaşlama yapısı Redüktör, birinci kademe involüt planet dişli ve ikinci kademe sikloidal planet dişliden oluşmaktadır. İkinci kademe redüktörü bağlamak için en az iki eksantrik mil kullanılır. Pinyon ve sikloidal dişli, katı döküm ve çelik parçalardan yapılmıştır. Sistem üç temel parçadan oluşmaktadır: esnek tekerlek, rijit tekerlek ve dalga üreteci. Basit ve kompakttır ve malzeme, hacim ve ağırlık RV redüktöründen daha düşüktür. Performans özellikleri Büyük hacim, yüksek yük kapasitesi (izin verilen tork yükü 28.000 N·m'ye ulaşabilir), yüksek rijitlik; Ancak aynı zamanda, ürün nispeten karmaşık bir üst konumlandırma yapısı kullanır, üretim süreci ve maliyet kontrolü daha zordur. Hacmi küçük ve yükü düşüktür (izin verilen tork yükü 1.500 N·m'ye kadar), ancak ana dişli esnek bir elemandır ve tekrarlanan deformasyon altında performansı kademeli olarak azalır ve ürünün taşıma kapasitesi ve ömrü sınırlıdır. Ürün, daha yüksek ürün torku ve darbe dayanımı, burulma devrilme sertliği, daha yüksek yorulma dayanımı, daha uzun hassasiyet ömrü ve yüksek hareket hassasiyeti sağlayabilir. Esnek dişli aktarımının yorulma ömrü düşüktür ve burulma direnci zayıftır. Robot tabanı, bel ve üst kol gibi büyük tork ve ağır yük eklemleri için daha uygundur. Genellikle ön kol, bilek ve el gibi hafif yük pozisyonlarında kullanılır. Gerçek kullanımda, RV redüktörleri öncelikle 20 kg'ın üzerindeki yükler için kullanılırken, RV harmonik redüktörleri 6 kg ile 20 kg arasındaki yükler için önerilir. 6 kg'ın altındaki yükler için tipik olarak harmonik redüktörler kullanılır. Ana terminal uygulama alanları: Otomotiv, fotovoltaik, kaynak, bükme, püskürtme, paletleme, metal işleme, ulaşım ve liman terminalleri gibi sektörleri kapsayan orta ve ağır hizmet robotları alanı. 3C elektronik, yarı iletken, gıda, enjeksiyon kalıplama, kalıp ve tıp sektörlerinde ise hafif hizmet robotlarına yüksek talep bulunmaktadır. 2. RV Redüktörünün Çalışma Prensibi ve Özellikleri: GB/T 34897-2017 “Rulmanlı Endüstriyel Robotlarda RV Redüktörleri için Hassas Rulmanlar” standardında tanımlandığı gibi, bir RV redüktörü, ön kademe olarak planet dişli redüktörü ve arka kademe olarak sikloidal pimli redüktörden oluşan bir iletim mekanizmasıdır. Belirli koşullar altında yüksek iletim oranına ve kendiliğinden kilitlenme özelliğine sahiptir. Geleneksel pimli burulma planet dişli sisteminden geliştirilen RV redüktörü, ön kademede planet dişli redüktörü ve arka kademede sikloidal pimli redüktörden oluşan çift kademeli bir redüksiyon sistemine sahiptir ve iki kademeyi birbirine bağlayan en az iki eksantrik şaft bulunur. Gövdesi ve sikloidal pimli dişlisi, döküm ve çelik bileşenler aracılığıyla sağlam bir şekilde birleştirilerek kapalı bir diferansiyel dişli sistemi oluşturur. Bu yenilik, geleneksel sikloidal pimli dişli sistemlerinin sınırlamalarının üstesinden gelmekle kalmaz, aynı zamanda yüksek hassasiyet (1 yay dakikasının altında diş boşluğu), olağanüstü rijitlik, üstün dayanıklılık, yüksek çıkış yoğunluğu (kompakt ancak güçlü), geniş hız düşürme oranı ve minimum titreşim gibi bir dizi avantaj da sunar. RV redüktörünün hareket iletim süreci şu şekilde çalışır: Servo motorun dönüşü, giriş dişlisi aracılığıyla planet dişlilere iletilir. Giriş dişlisi ile planet dişliler arasındaki dişli oranına bağlı olarak, hız buna göre düşürülür (birinci kademe düşürme). Krank mili, aynı dönüş hızını koruyarak doğrudan planet dişlilere bağlanır. Krank milinin eksantrik bölümü ile iğneli rulmanlar arasına iki adet sikloidal dişli takılmıştır. Krank mili döndüğünde, eksantrik bölüme monte edilmiş sikloidal dişliler de giriş mili etrafında eksantrik hareket gerçekleştirir. Öte yandan, iğneli rulman muhafazası, her sikloidal dişli için bir ek rulman olmak üzere, eşit aralıklarla yerleştirilmiş iğneli rulmanlar içerir. Krank mili bir tam dönüşünü tamamladığında, sikloidal dişliler eksantrik hareket gerçekleştirirken iğneli rulmanlarla temas eder. Bu işlem sırasında, çıkış planet dişli taşıyıcısı, krank milinin dönüş yönünün tersine bir diş mesafesi kadar döner. Bu dönüş daha sonra ikinci kademe redüksiyon ünitesinin miline iletilir (ikinci kademe redüksiyon). Toplam redüksiyon oranı, hem birinci hem de ikinci kademelerin redüksiyon oranlarının çarpımıdır.





