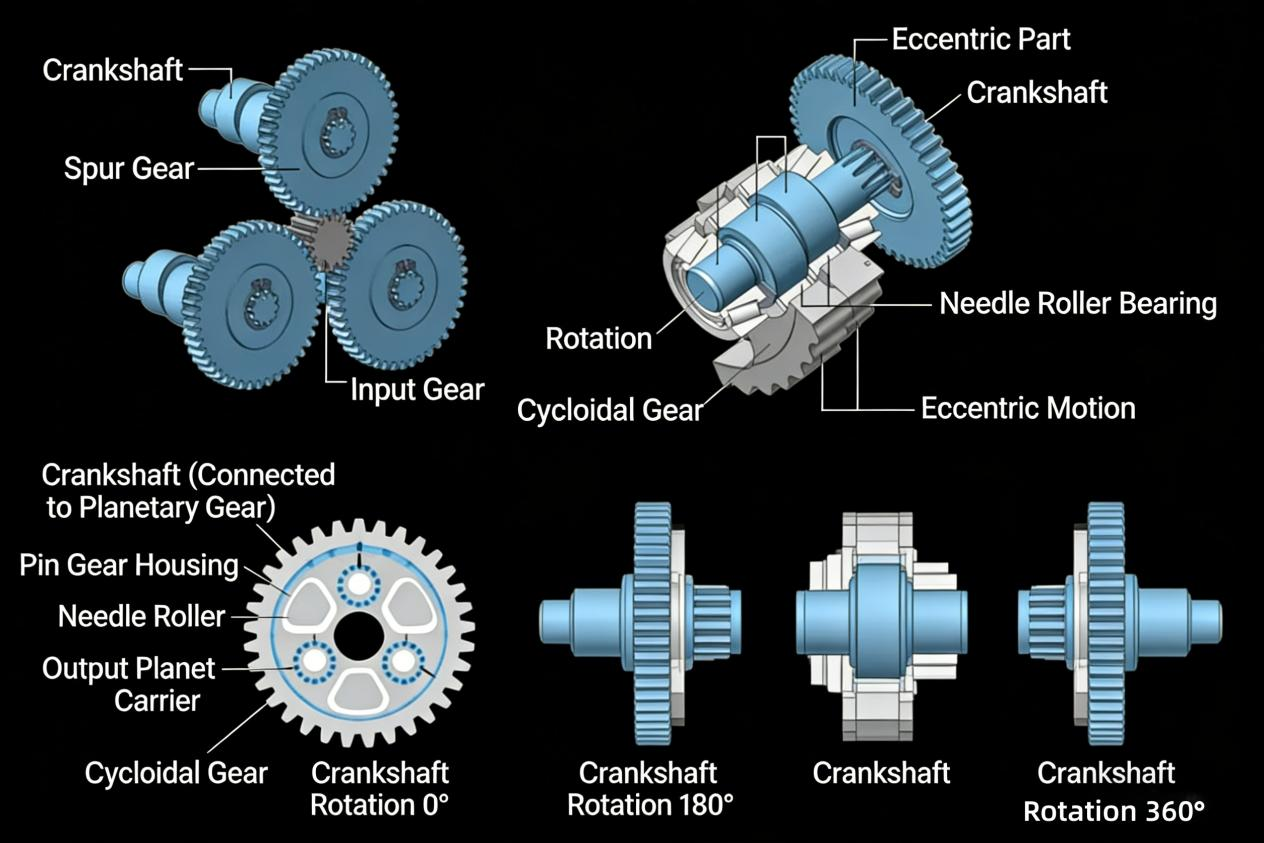
1. Princípio de Funcionamento e Classificação Principal dos Redutores Em sistemas de transmissão mecânica, um redutor funciona como um dispositivo intermediário crítico que conecta a fonte de energia ao atuador. Seu mecanismo principal envolve a redução por engrenagens e a amplificação do torque por meio da transmissão mecânica. Especificamente, o redutor emprega um sistema de engrenagens onde o eixo de entrada (com menos dentes) engrena com a engrenagem maior do eixo de saída, desacelerando efetivamente a força rotacional de alta velocidade do motor primário e aumentando o torque de saída. Como resultado, os redutores são amplamente utilizados em equipamentos de transmissão de baixa velocidade e alto torque, sendo considerados um fator chave que influencia o desempenho de robôs. Os redutores estão disponíveis em diversos tipos e modelos para atender às variadas necessidades de transmissão de potência em diferentes setores. Eles podem ser classificados de várias maneiras. Com base na precisão de controle, os redutores são categorizados em redutores de uso geral e redutores de precisão. Os redutores de uso geral oferecem menor precisão de controle, mas são suficientes para a transmissão básica de potência em máquinas em geral. Os redutores de precisão, por outro lado, apresentam alta exatidão, longa vida útil, folga mínima e confiabilidade superior, tornando-os ideais para aplicações de controle de alta precisão em robótica industrial, robótica colaborativa, automação industrial e outros campos de manufatura avançada. Os redutores de precisão, principalmente os redutores RV e os redutores harmônicos, são componentes essenciais na fabricação de equipamentos de ponta, como robôs, representando aproximadamente 35% do custo total de um robô industrial. Esses redutores são amplamente utilizados em aplicações de controle de alta precisão, incluindo robôs industriais, robôs colaborativos e automação industrial, onde enfrentam grandes desafios técnicos. Especificamente, os redutores harmônicos são projetados para aplicações leves e de baixa carga, enquanto os redutores RV são otimizados para cenários de carga média a alta, que exigem alto torque e rigidez. Estes últimos demandam tecnologia mais avançada, apresentam maiores desafios na produção e montagem e têm uma taxa de produção nacional menor. Atualmente, a Nabtesco, do Japão, mantém uma posição de liderança nesse mercado global. Devido às suas distintas características técnicas em princípios de transmissão e projetos estruturais, esses dois sistemas demonstram vantagens complementares em produtos e domínios de aplicação, atendendo a diversos cenários e indústrias de uso final. Uma comparação concreta em robótica industrial é a seguinte: projeto de redutor harmônico RV Princípio de transmissão e estrutura de desaceleração O redutor é composto por uma transmissão planetária involuta de primeiro estágio e uma transmissão planetária cicloidal de segundo estágio. Pelo menos dois eixos excêntricos são usados para conectar o redutor de segundo estágio. O pinhão e a engrenagem cicloidal são feitos de peças fundidas sólidas e aço. O sistema é composto por três partes principais: a roda flexível, a roda rígida e o gerador de ondas. É simples e compacto, e o material, o volume e o peso são menores do que os do redutor RV. Características de desempenho Grande volume, alta capacidade de carga (a carga de torque admissível pode atingir 28.000 N·m), alta rigidez; Ao mesmo tempo, o produto utiliza uma estrutura de sobreposição relativamente complexa, o processo de fabricação e o controle de custos são mais difíceis. O volume é pequeno e a carga é baixa (o torque admissível chega a 1.500 N·m), mas a engrenagem principal é um elemento flexível, e seu desempenho diminui gradualmente sob deformações repetidas, limitando a capacidade de carga e a vida útil do produto. O produto pode atingir maior torque e resistência a impactos, rigidez torsional, maior resistência à fadiga, maior precisão e alta precisão de movimento. A transmissão por engrenagem flexível tem baixa vida útil e fraca resistência à torção. A articulação sinovial é mais adequada para juntas com alto torque e carga pesada, como a base, a cintura e o braço de robôs. Geralmente é usada para posições com carga leve, como antebraço, pulso e mão. Na prática, os redutores RV são usados principalmente para cargas acima de 20 kg, enquanto os redutores harmônicos RV são recomendados para cargas entre 6 kg e 20 kg. Para cargas abaixo de 6 kg, normalmente são usados redutores harmônicos. Principais áreas de aplicação de terminais: O campo de robôs de médio e grande porte, representado por indústrias como automotiva, fotovoltaica, soldagem, dobra, pulverização, paletização, processamento de metais, transporte e terminais portuários. As indústrias de eletrônica 3C, semicondutores, alimentos, moldagem por injeção, moldes e médica apresentam alta demanda por robôs de pequeno porte. 2. Princípio de funcionamento e características do redutor RV: Conforme definido na norma GB/T 34897-2017 “Rolamentos de precisão para redutores RV em robôs industriais com rolamentos”, um redutor RV é um mecanismo de transmissão composto por um redutor de engrenagem planetária como estágio frontal e um redutor cicloidal como estágio traseiro. Ele apresenta alta relação de transmissão e capacidade de travamento automático sob condições específicas. O redutor RV, desenvolvido a partir da transmissão planetária tradicional com pinos de torção, apresenta um sistema de redução de dois estágios, composto por um redutor de engrenagens planetárias como estágio inicial e um redutor cicloidal com pinos como estágio final, com pelo menos dois eixos excêntricos conectando os dois estágios. Sua carcaça e o redutor cicloidal são acoplados solidamente por meio de peças fundidas e componentes de aço, formando um trem de engrenagens diferencial fechado. Essa inovação não apenas supera as limitações das transmissões cicloidais convencionais com pinos, mas também oferece uma série de vantagens, incluindo alta precisão (com folga entre os dentes inferior a 1 minuto de arco), rigidez excepcional, durabilidade superior, alta densidade de potência (compacto e potente), ampla faixa de redução de velocidade e vibração mínima. O processo de transmissão de movimento do redutor RV opera da seguinte forma: a rotação do servomotor é transmitida às engrenagens planetárias através da engrenagem de entrada. Com base na relação de transmissão entre a engrenagem de entrada e as engrenagens planetárias, a velocidade é reduzida correspondentemente (redução do primeiro estágio). O virabrequim é conectado diretamente às engrenagens planetárias, mantendo a mesma velocidade de rotação. Duas engrenagens cicloidais são instaladas entre a seção excêntrica do virabrequim e os rolamentos de agulhas. Quando o virabrequim gira, as engrenagens cicloidais montadas na seção excêntrica também realizam um movimento excêntrico em torno do eixo de entrada. Por outro lado, a caixa dos rolamentos de agulhas contém agulhas espaçadas uniformemente em intervalos, com uma agulha adicional por engrenagem cicloidal. À medida que o virabrequim completa uma rotação completa, as engrenagens cicloidais engatam com as agulhas enquanto realizam um movimento excêntrico. Durante esse processo, o porta-satélites de saída gira a distância de um dente na direção oposta à rotação do virabrequim. Essa rotação é então transmitida ao eixo da unidade de redução de segundo estágio (redução de segundo estágio). A relação de redução total é o produto das relações de redução do primeiro e do segundo estágios.





